Introduction
In computer vision, the most common goal is to classify an image (“cat”, “dog”, “car”, etc.). But in many cases, we are more interested in comparing images with each other: finding similar examples, grouping content, or measuring visual proximity. For this, we want to learn a representation space (embedding) in which similar images are close and different images are far apart.
In the first part of this series of articles, we will train a Siamese network with a triplet loss on CIFAR‑10.
We will then study the KoLeo loss, a batch-dependent regularization that aims to better distribute the embeddings. This dependency naturally raises the question of gradient accumulation (effective batch size): what impact does it have on training and the quality of embeddings?
We start by describing the dataset, the construction of triplets, and the evaluation, then we will compare the results with and without KoLeo before discussing the effect of gradient accumulation.
Throughout this article, we will set the random seed at appropriate moments to ensure reproducibility.
The dataset used
To train and evaluate our model, we use the CIFAR‑10 dataset, a classic benchmark composed of 60,000 color images (32×32 pixels) divided into 10 balanced classes: airplane, car, bird, cat, deer, dog, frog, horse, ship, and truck. The dataset is initially separated into 50,000 training examples and 10,000 test examples, but here we only use the training data.
After downloading, we notice that the archive contains 6 binary files: data_batch_1 to data_batch_5 and test_batch. We will only use the data_batch_* files.
import pickle
import numpy as np
def unpickle(file):
with open(file, 'rb') as fo:
dict = pickle.load(fo, encoding='bytes')
return dict
data_batch = [unpickle(f"../../../cifar-10-python/data_batch_{i}") for i in range(1, 6)]
images = np.concatenate([data_batch[i][b'data'] for i in range(5)])
labels = np.concatenate([data_batch[i][b'labels'] for i in range(5)])
images = images.reshape((-1, 3, 32, 32)).transpose(0, 2, 3, 1)
images.shape
We therefore have 50,000 images of size 32×32 in RGB. Here are a few selected randomly, with their class.
import matplotlib.pyplot as plt
label_names = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck']
n_rows, n_cols = 3, 5
indices = np.random.choice(len(images), n_rows * n_cols, replace=False)
fig, axes = plt.subplots(n_rows, n_cols, figsize=(n_cols, n_rows))
for ax, idx in zip(axes.ravel(), indices):
ax.imshow(images[idx])
label = label_names[labels[idx]]
ax.set_title(label)
ax.axis("off")
plt.tight_layout()
plt.show()

Siamese networks
What is a siamese network?
A siamese network is a neural network architecture designed not to directly predict a class, but to compare examples with each other.
The key idea is this: two images that we consider “similar” (for example, two dogs) must be close in the representation space, while two “different” images (a dog and a car) must be far apart. During training, we therefore present the model with pairs or triplets of images (anchor, positive, negative) and we adjust the weights to bring anchor and positive closer, while moving anchor and negative further apart.
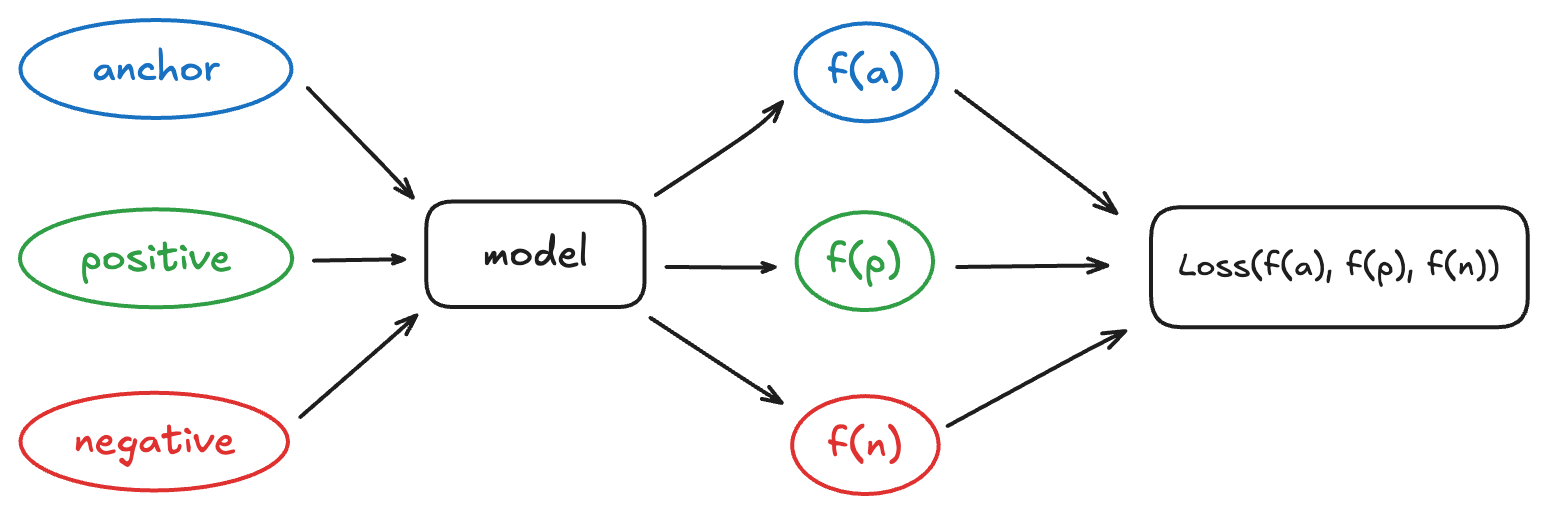
In the following, we will detail the model used to produce these embeddings as well as the cost function (the triplet loss) which formalizes this notion of similarity.
VGG11
VGG11 is a convolutional neural network architecture proposed in 2014 by a team from the University of Oxford (Simonyan and Zisserman). The major idea of the VGG network family is to stack many small 3×3 convolutional filters, separated by pooling layers, rather than using a few large convolutions. This allows increasing the depth of the network while keeping a very regular structure. We will start from this architecture pre-trained on ImageNet and adapt it to produce embeddings.

Let’s first see the size of the tensor at the output of VGG11.
import torch
from torchvision import models
vgg = models.vgg11(weights=None)
sample = images[0]
x = torch.from_numpy(sample).permute(2, 0, 1)
x = x.unsqueeze(0).float() / 255.0
with torch.no_grad():
out = vgg(x)
print("Size of the tensor after VGG11:", out.shape)
The size (1, 1000) means that, for an input image, VGG11 returns a vector of 1,000 components. This number comes directly from the final linear layer of the original model (FC-1000 then Softmax on the diagram): VGG11 was designed to assign a class among 1000 to each image. Its last layer therefore produces a vector of 1,000 scores containing the probabilities of belonging for all classes.
In our case, we will not use this vector. We will use the output of the last convolutional layer, accessible via vgg.features.
What is the size of the tensor just after the last convolutional layer?
with torch.no_grad():
out = vgg.features(x)
print("Size of the tensor after the last convolutional layer:", out.shape)
512corresponds to the number of feature maps produced by the last convolutional layer: 512 channels describing the image.(1, 1)corresponds to the spatial dimensions, reduced to 1×1 by the succession of convolutions and pooling. Each channel therefore summarizes the image into a single value before passing to the fully connected layers.
The input of the linear layer therefore has a dimension (512 x 1 x 1 = 512). To obtain a more compact embedding vector, we then project to dimension 128 via a linear layer. Finally, we add a normalization layer at the output, useful for comparisons between embeddings.
import torch.nn as nn
import torch.nn.functional as F
class VGG11Embedding(nn.Module):
def __init__(self, weights=None):
super(VGG11Embedding, self).__init__()
vgg = models.vgg11(weights=weights)
self.features = vgg.features
self.linear = nn.Linear(512, 128)
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, 1)
x = self.linear(x)
x = F.normalize(x, p=2, dim=1)
return x
Let’s check the output size of our model:
vgg_embedding = VGG11Embedding(weights=None)
with torch.no_grad():
out = vgg_embedding(x)
print("Tensor size after our model:", out.shape)
The triplet loss
Triplet loss enforces that, for each (anchor, positive, negative), the positive is embedded closer to the anchor than the negative, with a certain margin. In other words, we seek to verify
$$ d(f(a), f(p)) + m < d(f(a), f(n)) $$
where \(f(\cdot)\) is the embedding network, \(d\) a distance measure and \(m > 0\) the margin.
In our case, we use a distance derived from cosine similarity: the closer two vectors are angularly, the more they are considered similar. The triplet loss is then written, for a batch of size \(B\), $$ \mathcal{L} = \frac{1}{B} \sum_{i=1}^B \max\big(0,\ d(a_i, p_i) - d(a_i, n_i) + m\big). $$
Each term is zero as soon as the constraint is satisfied (the triplet is “good”). The value is strictly positive when anchor is still too close to negative. We therefore do not only want \(d(a_i, p_i) < d(a_i, n_i)\), but a separation of at least \(m\).
def triplet_loss(anchor, positive, negative, margin=0.4):
positive_distances = 1 - F.cosine_similarity(anchor, positive, dim=1)
negative_distances = 1 - F.cosine_similarity(anchor, negative, dim=1)
loss = torch.clamp(positive_distances - negative_distances + margin, min=0)
return loss.mean()
Construction of triplets
To train a siamese network with a triplet loss, we must transform our dataset of independent images into a dataset of triplets (anchor, positive, negative). On CIFAR‑10, we proceed class by class:
- for a given class (for example “cat”), we form pairs (
anchor,positive) with two images of this class; - we then randomly draw an image from a different class to play the role of
negative.
We repeat this operation for each of the 10 classes, which gives a globally balanced set of triplets. The code below constructs these triplets from the images and labels arrays, and we sample the number of negative images to 2,500.
triplets = np.empty((0, 3, 32, 32, 3), dtype=np.uint8)
triplets_labels = np.empty((0, 3), dtype=np.uint8)
seed = 42
np.random.seed(seed)
for target in range(10):
class_mask = (labels == target)
images_target = images[class_mask]
labels_target = labels[class_mask]
pairs = images_target.reshape(-1, 2, 32, 32, 3)
pos_labels = np.ones((len(pairs), 2), dtype=np.uint8) * target
not_target_mask = (labels != target)
images_not_target = images[not_target_mask]
labels_not_target = labels[not_target_mask]
n_neg = min(2500, len(images_not_target))
neg_indices = np.random.choice(len(images_not_target), n_neg, replace=False)
negatives = images_not_target[neg_indices]
neg_labels = labels_not_target[neg_indices]
pairs = pairs[:n_neg]
pos_labels = pos_labels[:n_neg]
class_triplets = np.concatenate(
[pairs, negatives.reshape(n_neg, 1, 32, 32, 3)],
axis=1,
)
class_triplet_labels = np.concatenate(
[pos_labels, neg_labels.reshape(n_neg, 1)],
axis=1,
)
triplets = np.concatenate([triplets, class_triplets], axis=0)
triplets_labels = np.concatenate([triplets_labels, class_triplet_labels], axis=0)
triplets.shape, triplets_labels.shape
The TripletsCIFAR10Dataset Class
To facilitate training, we encapsulate these triplets in a dedicated Dataset. The tensor of triplets is converted to the format (N, 3, C, H, W) then, at each call, the three images (anchor, positive, negative) are returned.
from torch.utils.data import Dataset
import torchvision.transforms as T
class TripletsCIFAR10Dataset(Dataset):
def __init__(self, triplets, transform=None):
# (N, 3, H, W, C) -> (N, 3, C, H, W)
self.triplets = torch.from_numpy(
triplets.transpose(0, 1, 4, 2, 3) / 255.0
).float()
self.transform = transform
def __len__(self):
return self.triplets.shape[0]
def __getitem__(self, idx):
triplet = self.triplets[idx]
anchor, positive, negative = triplet[0], triplet[1], triplet[2]
if self.transform is not None:
anchor = self.transform(anchor)
positive = self.transform(positive)
negative = self.transform(negative)
return anchor, positive, negative
train_transforms = T.Compose([
T.RandomCrop(32, padding=4),
T.RandomHorizontalFlip(),
T.Normalize(mean=[0.4914, 0.4822, 0.4465], std=[0.2470, 0.2435, 0.2616]),
])
val_transforms = T.Compose([
T.Normalize(mean=[0.4914, 0.4822, 0.4465], std=[0.2470, 0.2435, 0.2616]),
])
triplet_dataset = TripletsCIFAR10Dataset(triplets)
Let’s visualize a random selection of triplets.
n_examples = 5
indices = np.random.choice(len(triplet_dataset), n_examples, replace=False)
fig, axes = plt.subplots(n_examples, 3, figsize=(6, 1 * n_examples))
for row_idx, idx in enumerate(indices):
anchor, positive, negative = triplet_dataset[idx]
anchor_img = anchor.permute(1, 2, 0).numpy()
positive_img = positive.permute(1, 2, 0).numpy()
negative_img = negative.permute(1, 2, 0).numpy()
anchor_label = int(triplets_labels[idx, 0])
positive_label = int(triplets_labels[idx, 1])
negative_label = int(triplets_labels[idx, 2])
axes[row_idx, 0].imshow(anchor_img)
axes[row_idx, 0].set_title(f'anc: {label_names[anchor_label]}', fontsize=12)
axes[row_idx, 0].axis('off')
axes[row_idx, 0].set_ylabel(f'Triplet {idx}', fontsize=12, rotation=0, labelpad=50)
axes[row_idx, 1].imshow(positive_img)
axes[row_idx, 1].set_title(f'pos: {label_names[positive_label]}', fontsize=12)
axes[row_idx, 1].axis('off')
axes[row_idx, 2].imshow(negative_img)
axes[row_idx, 2].set_title(f'neg: {label_names[negative_label]}', fontsize=12)
axes[row_idx, 2].axis('off')
plt.tight_layout()
plt.show()

Training
Training parameters
To train our siamese network with the triplet loss, we must choose a few key hyperparameters:
- the batch size;
- the learning rate of the optimizer;
- the number of epochs;
- the margin of the triplet loss.
We also define the device here.
from torchvision.models import VGG11_Weights
if torch.cuda.is_available():
device = "cuda"
elif hasattr(torch.backends, "mps") and torch.backends.mps.is_available():
device = "mps"
else:
device = "cpu"
batch_size = 64
learning_rate = 5e-4
margin = 0.4
Evaluation metrics
We use the following metrics to evaluate the model on the validation phase:
- ratio of “good” triplets: proportion of triplets where
anchoris closer topositivethan tonegative; - mean cosine similarities
anchor–positiveandanchor–negative; - mean Euclidean distances
anchor–positiveandanchor–negative; - AUC.
AUC (Area Under the Curve)
The AUC is the area under the ROC curve (Receiver Operating Characteristic), which plots the true positive rate as a function of the false positive rate for all possible thresholds. It measures the model’s ability to correctly order the examples: concretely, it is the probability that a positive example receives a higher similarity than a negative example. An AUC of 0.5 corresponds to a random classification, while an AUC of 1 indicates a perfect separation.
In our context, the network produces embeddings (and not class probabilities). To calculate the AUC, we reduce to a binary pair-to-pair task: we consider (anchor, positive) as a positive pair (label 1) and (anchor, negative) as a negative pair (label 0). The cosine similarity between embeddings serves as a score, and the AUC summarizes how well the model assigns higher similarities to pairs of the same class.
Training Loop
The training loop iterates through the DataLoader of triplets, calculates the embeddings (f(a), f(p), f(n)) for each batch, evaluates the triplet loss, then performs a backpropagation step and weight update. We also calculate the average loss per epoch and periodically display the current loss to track convergence.
def train_loop(net, dataloader, optimizer, margin, print_freq=10):
net.train()
loss_accum = 0.0
epoch_loss = 0.0
for batch_idx, (anc, pos, neg) in enumerate(dataloader):
anc, pos, neg = anc.to(device), pos.to(device), neg.to(device)
anc_feat, pos_feat, neg_feat = net(anc), net(pos), net(neg)
loss = triplet_loss(anc_feat, pos_feat, neg_feat, margin)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_accum += loss.item()
epoch_loss += loss.item()
if (batch_idx + 1) % print_freq == 0:
print(f"Batch {batch_idx+1} : loss = {loss_accum / print_freq:.4f}")
loss_accum = 0.0
return epoch_loss / (batch_idx + 1)
Validation loop
For the entire validation set, we calculate the metrics defined above.
from sklearn.metrics import roc_auc_score
def validation_loop(net, dataloader, margin):
net.eval()
val_loss = 0.0
good_triplets = 0
total_triplets = 0
positive_similarities = []
negative_similarities = []
positive_euclidean_distances = []
negative_euclidean_distances = []
with torch.no_grad():
for batch_idx, (anc, pos, neg) in enumerate(dataloader):
anc, pos, neg = anc.to(device), pos.to(device), neg.to(device)
anc_feat, pos_feat, neg_feat = net(anc), net(pos), net(neg)
loss = triplet_loss(anc_feat, pos_feat, neg_feat, margin)
val_loss += loss.item()
batch_pos_euc = F.pairwise_distance(anc_feat, pos_feat, p=2)
batch_neg_euc = F.pairwise_distance(anc_feat, neg_feat, p=2)
positive_euclidean_distances.append(batch_pos_euc)
negative_euclidean_distances.append(batch_neg_euc)
batch_pos_sim = F.cosine_similarity(anc_feat, pos_feat, dim=1)
batch_neg_sim = F.cosine_similarity(anc_feat, neg_feat, dim=1)
positive_similarities.append(batch_pos_sim)
negative_similarities.append(batch_neg_sim)
good_triplets += (batch_pos_sim > batch_neg_sim).sum()
total_triplets += anc.shape[0]
positive_euclidean_distances = torch.cat(positive_euclidean_distances, dim=0)
negative_euclidean_distances = torch.cat(negative_euclidean_distances, dim=0)
positive_similarities = torch.cat(positive_similarities, dim=0)
negative_similarities = torch.cat(negative_similarities, dim=0)
scores = torch.cat([positive_similarities, negative_similarities], dim=0)
targets = torch.cat([
torch.ones_like(positive_similarities),
torch.zeros_like(negative_similarities)
], dim=0)
val_auc = roc_auc_score(targets.cpu().numpy(), scores.cpu().numpy())
return {
"val_loss": val_loss / (batch_idx + 1),
"val_auc": val_auc,
"mean_positive_similarities": positive_similarities.mean().item(),
"mean_negative_similarities": negative_similarities.mean().item(),
"mean_positive_euclidean_distances": positive_euclidean_distances.mean().item(),
"mean_negative_euclidean_distances": negative_euclidean_distances.mean().item(),
"good_triplets_ratio": (good_triplets / total_triplets).item(),
}
Complete training over several epochs
To train a model, we need to construct our training and validation datasets:
from torch.utils.data import DataLoader
val_split = 0.05
num_train = int((1 - val_split) * len(triplets))
np.random.seed(seed)
shuffle_indices = np.random.permutation(len(triplets))
shuffled_triplets = triplets[shuffle_indices]
shuffled_triplets_labels = triplets_labels[shuffle_indices]
train_triplets = shuffled_triplets[:num_train, ...]
val_triplets = shuffled_triplets[num_train:]
train_labels = shuffled_triplets_labels[:num_train, ...]
val_labels = shuffled_triplets_labels[num_train:]
train_dataset = TripletsCIFAR10Dataset(train_triplets, transform=train_transforms)
val_dataset = TripletsCIFAR10Dataset(val_triplets, transform=val_transforms)
We can now write the complete training loop: at each epoch, we train the model on the training triplets, then we calculate the metrics on the validation.
To facilitate experiments, we regularly save the weights. We also save the configuration and validation metrics in the current experiment folder.
from datetime import datetime
import json
from pathlib import Path
runs_dir = Path('runs')
runs_dir.mkdir(exist_ok=True)
timestamp = datetime.now().strftime('%Y%m%d_%H%M%S')
save_dir = runs_dir / timestamp
save_dir.mkdir(exist_ok=True)
epochs = 15
save_ckpt_freq = 1
with (save_dir / "config.json").open("w") as fp:
json.dump({
"seed": seed,
"batch_size": batch_size,
"learning_rate": learning_rate,
"epochs": epochs,
"margin": margin,
"val_split": val_split,
"num_train": num_train,
"save_ckpt_freq": save_ckpt_freq
}, fp, indent=4)
import csv
import random
metrics_path = save_dir / "training_metrics.csv"
train_losses = []
val_losses = []
best_auc = 0
best_epoch_path = None
csv_headers = [
"epoch",
"train_loss",
"val_loss",
"val_auc",
"mean_positive_similarities",
"mean_negative_similarities",
"mean_positive_euclidean_distances",
"mean_negative_euclidean_distances",
"good_triplets_ratio"
]
with open(metrics_path, mode='w', newline='') as csvfile:
writer = csv.DictWriter(csvfile, fieldnames=csv_headers)
writer.writeheader()
random.seed(seed)
torch.manual_seed(seed)
if torch.cuda.is_available():
torch.cuda.manual_seed(seed)
if torch.mps.is_available():
torch.mps.manual_seed(seed)
gt = torch.Generator()
gt.manual_seed(seed)
val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False)
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, generator=gt)
net = VGG11Embedding(weights=VGG11_Weights.IMAGENET1K_V1).to(device)
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate)
val_metrics = validation_loop(net, val_loader, margin)
print(f"Before training")
print(
f"Validation metrics — "
f"val_loss: {val_metrics['val_loss']:.4f}, "
f"val_auc: {val_metrics['val_auc']:.4f}, "
f"mean_positive_similarities: {val_metrics['mean_positive_similarities']:.4f}, "
f"mean_negative_similarities: {val_metrics['mean_negative_similarities']:.4f}, "
f"mean_positive_euclidean_distances: {val_metrics['mean_positive_euclidean_distances']:.4f}, "
f"mean_negative_euclidean_distances: {val_metrics['mean_negative_euclidean_distances']:.4f}, "
f"good_triplets_ratio: {val_metrics['good_triplets_ratio']:.4f}"
)
with open(metrics_path, mode='a', newline='') as csvfile:
writer = csv.DictWriter(csvfile, fieldnames=csv_headers)
writer.writerow({
"epoch": 0,
"train_loss": "", # No train_loss before training
"val_loss": val_metrics['val_loss'],
"val_auc": val_metrics['val_auc'],
"mean_positive_similarities": val_metrics['mean_positive_similarities'],
"mean_negative_similarities": val_metrics['mean_negative_similarities'],
"mean_positive_euclidean_distances": val_metrics['mean_positive_euclidean_distances'],
"mean_negative_euclidean_distances": val_metrics['mean_negative_euclidean_distances'],
"good_triplets_ratio": val_metrics['good_triplets_ratio']
})
for epoch_idx in range(epochs):
train_loss = train_loop(net, train_loader, optimizer, margin, print_freq=100)
val_metrics = validation_loop(net, val_loader, margin)
val_losses.append(val_metrics['val_loss'])
train_losses.append(train_loss if epoch_idx > 0 else val_metrics['val_loss'])
print(
f"Epoch {epoch_idx+1} — "
f"train_loss = {train_loss:.4f}, "
f"val_loss = {val_metrics['val_loss']:.4f}"
)
print(
f"Validation metrics — "
f"val_loss: {val_metrics['val_loss']:.4f}, "
f"val_auc: {val_metrics['val_auc']:.4f}, "
f"mean_positive_similarities: {val_metrics['mean_positive_similarities']:.4f}, "
f"mean_negative_similarities: {val_metrics['mean_negative_similarities']:.4f}, "
f"mean_positive_euclidean_distances: {val_metrics['mean_positive_euclidean_distances']:.4f}, "
f"mean_negative_euclidean_distances: {val_metrics['mean_negative_euclidean_distances']:.4f}, "
f"good_triplets_ratio: {val_metrics['good_triplets_ratio']:.4f}"
)
with open(metrics_path, mode='a', newline='') as csvfile:
writer = csv.DictWriter(csvfile, fieldnames=csv_headers)
writer.writerow({
"epoch": epoch_idx + 1,
"train_loss": train_loss,
"val_loss": val_metrics['val_loss'],
"val_auc": val_metrics['val_auc'],
"mean_positive_similarities": val_metrics['mean_positive_similarities'],
"mean_negative_similarities": val_metrics['mean_negative_similarities'],
"mean_positive_euclidean_distances": val_metrics['mean_positive_euclidean_distances'],
"mean_negative_euclidean_distances": val_metrics['mean_negative_euclidean_distances'],
"good_triplets_ratio": val_metrics['good_triplets_ratio']
})
if val_metrics['val_auc'] > best_auc:
best_auc = val_metrics['val_auc']
if best_epoch_path is not None:
best_epoch_path.unlink()
best_epoch_path = save_dir / f'best_epoch_{epoch_idx+1}.pth'
torch.save(net.state_dict(), best_epoch_path)
print(f"New best AUC: {best_auc:.4f} (epoch {epoch_idx+1})")
if (epoch_idx+1) % save_ckpt_freq == 0:
torch.save(net.state_dict(), save_dir / f'epoch_{epoch_idx+1}.pth')
Validation metrics — val_loss: 0.3156, val_auc: 0.6642, mean_positive_similarities: 0.2750, mean_negative_similarities: 0.1853, mean_positive_euclidean_distances: 1.1968, mean_negative_euclidean_distances: 1.2714, good_triplets_ratio: 0.6656
Batch 100 : loss = 0.2465
Batch 200 : loss = 0.2036
Batch 300 : loss = 0.1619
Epoch 1 — train_loss = 0.1966, val_loss = 0.1742
Validation metrics — val_loss: 0.1742, val_auc: 0.8233, mean_positive_similarities: 0.7488, mean_negative_similarities: 0.2164, mean_positive_euclidean_distances: 0.5882, mean_negative_euclidean_distances: 1.1666, good_triplets_ratio: 0.8264
New best AUC: 0.8233 (epoch 1)
Batch 100 : loss = 0.1609
Batch 200 : loss = 0.1348
Batch 300 : loss = 0.1436
Epoch 2 — train_loss = 0.1433, val_loss = 0.1177
Validation metrics — val_loss: 0.1177, val_auc: 0.8939, mean_positive_similarities: 0.7731, mean_negative_similarities: 0.0771, mean_positive_euclidean_distances: 0.5667, mean_negative_euclidean_distances: 1.2967, good_triplets_ratio: 0.8840
New best AUC: 0.8939 (epoch 2)
Batch 100 : loss = 0.1226
Batch 200 : loss = 0.1147
Batch 300 : loss = 0.1107
... Epoch 15 — train_loss = 0.0354, val_loss = 0.0621
Validation metrics — val_loss: 0.0621, val_auc: 0.9522, mean_positive_similarities: 0.7842, mean_negative_similarities: -0.0637, mean_positive_euclidean_distances: 0.5275, mean_negative_euclidean_distances: 1.4324, good_triplets_ratio: 0.9384
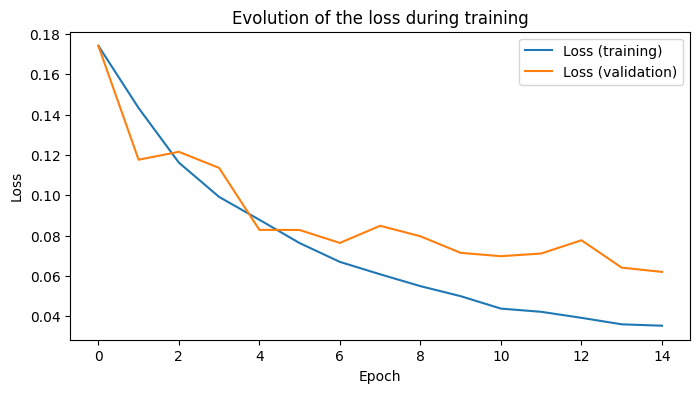
Visualization of the training loss curve
Let’s plot the evolution of the loss during training. We plot the training loss and the validation loss.
plt.figure(figsize=(8, 4))
plt.plot(train_losses, label="Loss (training)")
plt.plot(val_losses, label="Loss (validation)")
plt.xlabel("Epoch")
plt.ylabel("Loss")
plt.legend()
plt.title("Evolution of the loss during training")
plt.show()
Here, we load the best epoch of the model.
best_epoch_path = list((save_dir.glob('best_epoch_*.pth')))[0]
net.load_state_dict(torch.load(best_epoch_path))
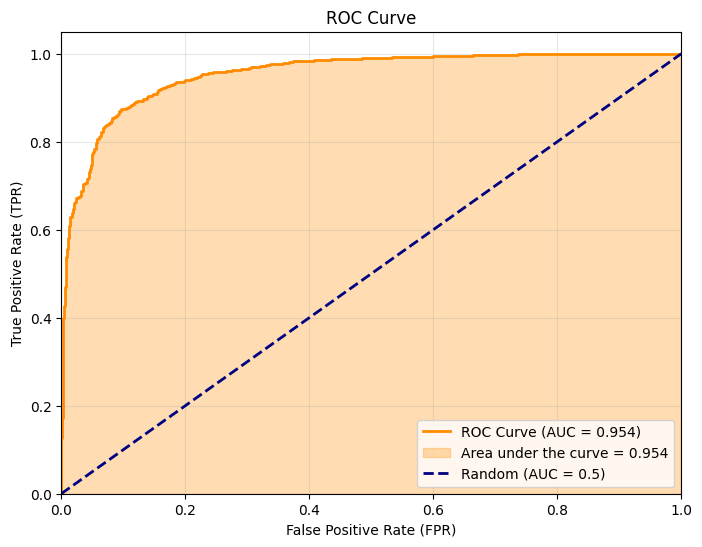
ROC curve
To better interpret the model’s performance, we plot the ROC (Receiver Operating Characteristic) curve, which represents the true positive rate against the false positive rate for all possible thresholds. The area under this curve (AUC) summarizes in a single number the model’s ability to separate pairs of the same class from pairs of different classes.
We use the validation data to construct this curve: (anchor, positive) pairs are considered positive (label 1) and (anchor, negative) pairs are considered negative (label 0). The cosine similarity between embeddings serves as the score.
from sklearn.metrics import roc_curve, auc
import matplotlib.pyplot as plt
net.eval()
positive_similarities = []
negative_similarities = []
with torch.no_grad():
for batch_idx, (anc, pos, neg) in enumerate(val_loader):
anc, pos, neg = anc.to(device), pos.to(device), neg.to(device)
anc_feat, pos_feat, neg_feat = net(anc), net(pos), net(neg)
batch_pos_sim = F.cosine_similarity(anc_feat, pos_feat, dim=1)
batch_neg_sim = F.cosine_similarity(anc_feat, neg_feat, dim=1)
positive_similarities.append(batch_pos_sim)
negative_similarities.append(batch_neg_sim)
positive_similarities = torch.cat(positive_similarities, dim=0)
negative_similarities = torch.cat(negative_similarities, dim=0)
scores = torch.cat([positive_similarities, negative_similarities], dim=0).cpu().numpy()
targets = torch.cat([
torch.ones_like(positive_similarities),
torch.zeros_like(negative_similarities)
], dim=0).cpu().numpy()
fpr, tpr, thresholds = roc_curve(targets, scores)
roc_auc = auc(fpr, tpr)
plt.figure(figsize=(8, 6))
plt.plot(fpr, tpr, color='darkorange', lw=2, label=f'ROC Curve (AUC = {roc_auc:.3f})')
plt.fill_between(fpr, tpr, alpha=0.3, color='darkorange', label=f'Area under the curve = {roc_auc:.3f}')
plt.plot([0, 1], [0, 1], color='navy', lw=2, linestyle='--', label='Random (AUC = 0.5)')
plt.xlim([0.0, 1.0])
plt.ylim([0.0, 1.05])
plt.xlabel('False Positive Rate (FPR)')
plt.ylabel('True Positive Rate (TPR)')
plt.title('ROC Curve')
plt.legend(loc="lower right")
plt.grid(alpha=0.3)
plt.show()
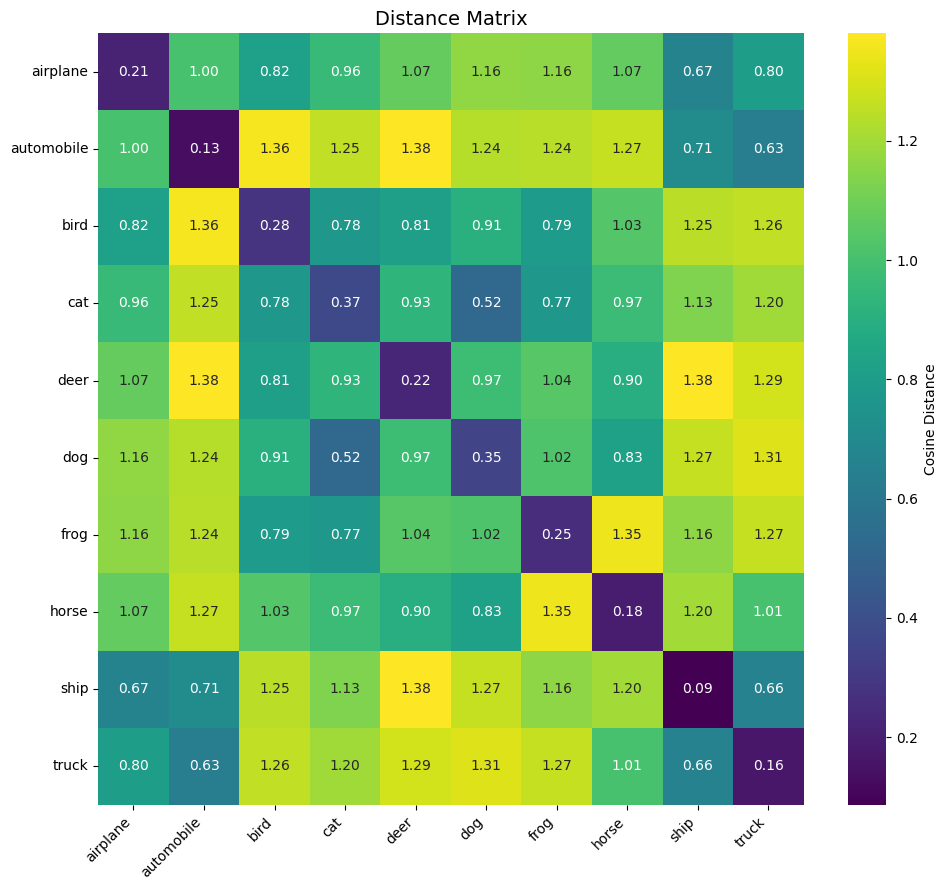
Distance matrix
We can already compare the distances between anchor and positive, and those between anchor and negative. The former should be smaller than the latter.
One way to verify this is to construct a 10×10 matrix where each cell (i, j) contains the average distance (here derived from cosine similarity) between the embeddings of images from class (i) and those from class (j). On the diagonal, we find the intra-class distances (which should be small if the model groups similar images well). A heatmap allows quick visualization of the quality of the learned separation.
To calculate this matrix, we start by building a dictionary containing the embeddings from the validation set, grouped by class.
net.eval()
embeddings_by_class = {i: [] for i in range(10)}
with torch.no_grad():
anchor_labels = val_labels[:, 0]
for idx in range(len(val_triplets)):
label = int(anchor_labels[idx])
img = torch.from_numpy(val_triplets[idx, 0].transpose(2, 0, 1) / 255.0).float()
img = val_transforms(img)
img = img.unsqueeze(0).to(device)
embedding = net(img)
embeddings_by_class[label].append(embedding.cpu())
embeddings_by_class = {label: torch.cat(embeddings_by_class[label], dim=0) for label in range(10)}
samples_per_class = [len(embeddings_by_class[i]) for i in range(10)]
print("Number of embeddings per class:")
for class_idx, count in enumerate(samples_per_class):
print(f" {label_names[class_idx]:10s} : {count}")
Now we can plot the heatmap distance matrix.
import seaborn as sns
dist_matrix = np.zeros((10, 10))
for i in range(10):
for j in range(10):
emb_i = embeddings_by_class[i]
emb_j = embeddings_by_class[j]
emb_i_norm = F.normalize(emb_i, p=2, dim=1)
emb_j_norm = F.normalize(emb_j, p=2, dim=1)
cosine_sim = torch.mm(emb_i_norm, emb_j_norm.t())
cosine_dist = 1 - cosine_sim
dist_matrix[i, j] = cosine_dist.mean().item()
print(f"Dimension of the distance matrix: {dist_matrix.shape}")
plt.figure(figsize=(10, 9))
col_labels = [f"{label_names[i]}" for i in range(10)]
row_labels = [f"{label_names[i]}" for i in range(10)]
sns.heatmap(dist_matrix,
xticklabels=col_labels,
yticklabels=row_labels,
annot=True,
fmt='.2f',
cmap='viridis',
cbar_kws={'label': 'Cosine Distance'})
plt.title('Distance Matrix', fontsize=14)
plt.xticks(rotation=45, ha='right')
plt.yticks(rotation=0)
plt.tight_layout()
plot_filename = save_dir / "distance_matrix_heatmap.png"
plt.savefig(plot_filename)
print(f"Heatmap saved in {plot_filename}")
plt.show()
plt.close()
same_class_dists = np.diag(dist_matrix)
diff_class_dists = []
for i in range(10):
for j in range(10):
if i != j:
diff_class_dists.append(dist_matrix[i, j])
print(f"\nIntra-class distance: mean={np.mean(same_class_dists):.4f}, std={np.std(same_class_dists):.4f}")
print(f"Inter-class distance: mean={np.mean(diff_class_dists):.4f}, std={np.std(diff_class_dists):.4f}")
print(f"Separation margin: {np.mean(diff_class_dists) - np.mean(same_class_dists):.4f}")
> Heatmap saved in runs/20251226_232950/distance_matrix_heatmap.png
> Inter-class distance: mean=1.0392, std=0.2285
> Separation margin: 0.8143
Several interesting observations emerge from this matrix:
Low diagonal: intra-class distances (on the diagonal) are all less than 0.4, showing that the model groups images of the same class well. The best grouped classes are ship (0.09) and automobile (0.13).
Good overall separation: the separation margin (difference between the average inter-class distance and the average intra-class distance) is about 0.70, which is a good sign.
Expected semantic confusions: some pairs of classes remain relatively close, which corresponds to real visual similarities:
- cat and dog (0.52): two furry animals of similar size;
- airplane and ship (0.67): vehicles with elongated shapes, often with uniform backgrounds (sky/water);
- automobile and truck (0.63): road vehicles sharing common visual characteristics.
Well-separated classes: conversely, automobile vs deer (1.38) or bird vs truck (1.26) show high distances, consistent with the absence of visual resemblance between these categories.
2D projection using PCA
It is also interesting to observe how our embeddings are distributed. As they live in a 128-dimensional space, we project them into 2D to visualize them.
For this, we use PCA (Principal Component Analysis): a linear dimensionality reduction method.
from sklearn.decomposition import PCA
all_embeddings = torch.cat([embeddings_by_class[k] for k in embeddings_by_class], dim=0).cpu().numpy()
pca_2d = PCA(n_components=2)
embeddings_2d = pca_2d.fit_transform(all_embeddings)
We will normalize the embeddings. This ensures a fairer comparison with future results and makes the distances more interpretable.
embeddings_2d = (embeddings_2d - embeddings_2d.min(axis=0)) / (embeddings_2d.max(axis=0) - embeddings_2d.min(axis=0))
Let’s proceed with the projection. In addition to the points, for each class, we draw an ellipse that contains (k%) of the points (here k = 50%). We call this parameter coverage.
Let’s start by writing the function that calculates the parameters of these ellipses. The calculation involves a Mahalanobis distance and an eigenvalue decomposition; I won’t go into detail here, but I’ll provide the code.
def compute_ellipse_parameters(embeddings, coverage):
center = np.median(embeddings, axis=0)
cov = np.cov(embeddings, rowvar=False)
try:
inv_cov = np.linalg.inv(cov)
except np.linalg.LinAlgError:
inv_cov = np.linalg.pinv(cov)
# Squared Mahalanobis distances and empirical quantile for coverage
d2 = np.einsum("ij,jk,ik->i", embeddings - center, inv_cov, embeddings - center)
threshold = np.quantile(d2, coverage)
# Ellipse parameters from covariance eigen decomposition
vals, vecs = np.linalg.eigh(cov)
order = vals.argsort()[::-1]
vals, vecs = vals[order], vecs[:, order]
width, height = 2.0 * np.sqrt(vals * threshold)
angle = np.degrees(np.arctan2(vecs[1, 0], vecs[0, 0]))
return center, width, height, angle
We can now calculate the ellipse parameters for each class.
labels_array = np.concatenate([np.full(count, label) for label, count in enumerate(samples_per_class)])
coverage = 0.50
def get_ellipse_params_per_class(embeddings_2d, coverage):
ellipse_params = {}
for cls in label_names:
cls_idx = label_names.index(cls)
X = embeddings_2d[labels_array == cls_idx]
center, width, height, angle = compute_ellipse_parameters(X, coverage)
ellipse_params[cls] = {
"center": center.tolist(),
"width": float(width),
"height": float(height),
"angle": float(angle),
}
return ellipse_params
ellipse_params = get_ellipse_params_per_class(embeddings_2d, coverage)
Let’s proceed with the projection.
import pandas as pd
from matplotlib.patches import Ellipse
def plot_embeddings_with_ellipses(
embeddings_2d,
ellipse_params,
save_img_path,
):
pca_2d_df = pd.DataFrame({
'PC1': embeddings_2d[:, 0],
'PC2': embeddings_2d[:, 1],
'Label': labels_array,
'Class': [label_names[int(label)] for label in labels_array]
})
fig, ax = plt.subplots(figsize=(12, 10))
palette = sns.color_palette("tab10", n_colors=10)
class_names = sorted(pca_2d_df['Class'].unique())
color_map = {cls: palette[i] for i, cls in enumerate(class_names)}
sns.scatterplot(
data=pca_2d_df, x='PC1', y='PC2',
hue='Class', palette=color_map,
alpha=0.7, s=30, ax=ax
)
for cls in class_names:
ep = ellipse_params[cls]
center, w, h, angle = ep["center"], ep["width"], ep["height"], ep["angle"]
color = color_map[cls]
ellipse = Ellipse(
xy=center, width=w, height=h, angle=angle,
facecolor=(*color, 0.12), edgecolor=color, linewidth=2
)
ax.add_patch(ellipse)
ax.set_xlabel('PC1')
ax.set_ylabel('PC2')
ax.set_title('PCA 2D projection of embeddings by class')
ax.legend(title='Classes', bbox_to_anchor=(1.02, 1), loc='upper left')
plt.tight_layout()
plt.savefig(save_img_path, dpi=150, bbox_inches='tight')
plt.show()
plot_embeddings_with_ellipses(
embeddings_2d,
ellipse_params,
save_img_path = save_dir / "embeddings_2d.png"
)
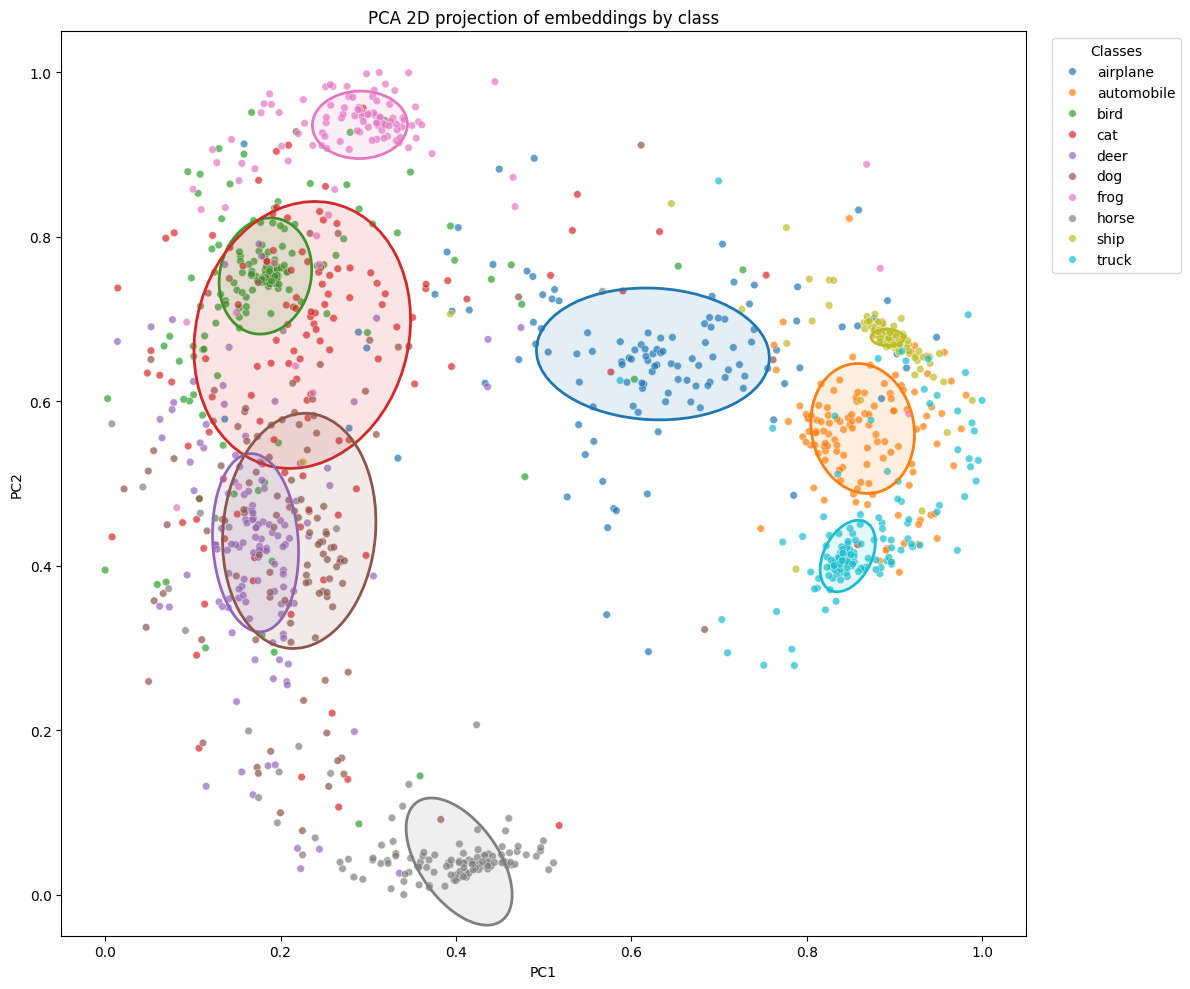
The result depends on the chosen seed. Unless you run the exact same code (and with the same seed), you will necessarily get a different projection. Nevertheless, we generally find a few trends:
- ship has the smallest ellipse area, which confirms the analysis of the distance matrix
- the cat and dog points are close, as expected
- moreover, for this training, we can see that the dog, deer, cat, and bird points overlap with each other, as they are all semantically close, they are all animals. Even frog is not far away.
- further confirmation from the distance matrix: automobile and deer are well separated, as are bird and truck.
Here are some statistics about our ellipse areas.
mean_area = 0
for ep_dict in ellipse_params.values():
area = np.pi * ep_dict["width"] * ep_dict["height"] / 4
ep_dict["area"] = area
mean_area += area
print(f"Average area of the ellipses: {mean_area / len(ellipse_params):.4f}")
for k, v in ellipse_params.items():
if k in ["ship", "cat", "dog", "horse"]:
print(f"Ellipse area of {k} = {v['area']:.4f}")
> Ellipse area of cat = 0.0626
> Ellipse area of dog = 0.0392
> Ellipse area of horse = 0.0125
> Ellipse area of ship = 0.0006
Conclusion
In this article, we analyzed the embeddings obtained after training a siamese network with a triplet loss on CIFAR‑10. The results show a good separation of classes in the embedding space, and the observed confusions (cat/dog, airplane/ship) correspond to real visual similarities. The distance matrix and the PCA projection with confidence ellipses allow us to visualize and quantify the compactness of each group.
In the next part of this series, we will introduce the KoLeo loss to encourage a more uniform distribution of embeddings, and we will study the impact of gradient accumulation on this batch-dependent regularization.
References
- Siamese Neural Networks with Triplet Loss and Cosine Distance - Towards Data Science
- CIFAR-10 Dataset - University of Toronto